随着科学技术水平的提高和世界经济的快速发展,工程机器人越来越广泛地被应用到许多行业当中,尤其是在高危、恶劣环境以及枯燥、繁重的作业领域,对工程机器人的需求更加迫切。因而,工程机器人的开发与应用,引起了世界各国的高度重视,产品发展前景十分广阔。
1 工程机器人的定义与分类
工程机器人是一种面向高危及特殊环境下依靠自身动力和控制能力来进行工程施工作业的遥操作多关节机械手或多自由度机器人。它既具有工程机械的大功率、多功能、适用范围广的优点,又具有机器人的灵活移动、环境感知、智能识别等各种功能。
工程机器人是机器人家族中的新成员。与工业机器人在固定环境下依据事先编制的程序运行不同,工程机器人主要在非结构环境下工作,靠接受人类指挥,或依据以人工智能技术制定的原则纲领行动。因此工程机器人更强调感知、思维和复杂行动的能力,比一般意义上的工业机器人需要更大的灵活性、机动性,具有更强的感知能力、决策能力、反应能力以及行动能力。工程机器人从外观上也远远脱离了最初工业机器人所具有的形状。工程机器人融合了更多学科的知识,如机构学、控制工程、计算机科学、人工智能、微电子学、光学、传感技术、材料科学、仿生学等。
工程机器人根据应用领域可以分为:农林业工程机器人、工业工程机器人、建筑工程机器人、矿业工程机器人、核工业工程机器人、抢险救援工程机器人、军事工程机器人等;按作业方式可以分为:破拆机器人、搬运机器人、抓取装卸机器人、探测机器人等。
2 工程机器人的基本结构与工作特性
工程机器人的基本特征是液压驱动、遥操作、移动作业,具有大功率作业、宽范围作业、多功能作业和智能作业的特点。
工程机器人的基本构成包括:控制系统、驱动装置、执行机构和感知系统组成,如图1所示。
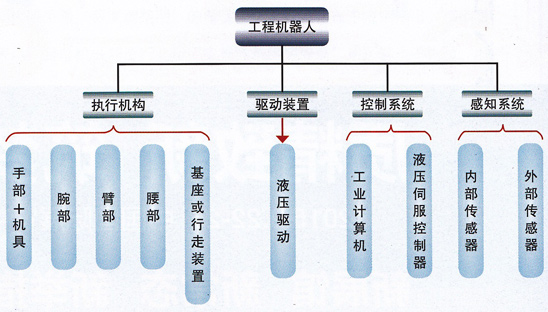
图(1)
级调速和力控制,防过载性能好。由于液压驱动可以实现直接驱动,省去工业机器人的减速机加伺服电机的传动机构,使得驱动系统简单,结构紧凑。随着液压伺服控制技术不断提高以及数值液压技术的发展,液压驱动将更能代表机器人的节能化、轻量化、紧凑化和智能化的发展方向。
执行系统:与工业机器人相比,工程机器人执行系统主要增加了行走系统。尤其是在不同环境下使用,要求工程机器人具备全地形行走功能。图2所示vcb为一种典型工程机器人——破拆机器人的执行机构。

图(2)
这种典型的执行机构由手部、腕部、小臂(上臂)、大臂(下臂)、腰部、足部等组成。其中手部为末端执行器,如夹持工具之类的属具。可以更换不同的属具,如液压剪、液压锤、液压抓斗等,以实现不同的作业能力。腕部通常具有3自由度,实现手部动作,是执行机构最复杂的部分。臂部用于连接腰部和腕部,带动腕部做平面运动。腰部用来连接臂部与基座,做回转运动,是执行机构的关键部件。足部包括行走系统和作业时用于支撑机体的支腿。
控制系统:工程机器人的控制系统一般比较复杂,涉及到行走、避障、有效作业等方面,要求控制系统具有较强的推理和思维能力,实时响应能力强,适应非结构性环境能力强。控制系统是机器人系统功能实现的核心,如果把机器人机械结构比作人的骨豁和肌肉的话,机器人控制系统就相当于人的神经系统。机器人要实现自身的运动、对环境的感知以及与外界的交互等功能,都需要控制系统对各机械部件以及传感器单元进行协调和控制。
感知系统:工程机器人的感知能力是未来工程机器人智能化的研究重点之一。机器人传感器在机器人的控制中起了非常重要的作用,机器人传感器分为内部传感器和外部传感器2大类。内部传感器主要有位置传感器、速度传感器、力传感器、温度传感器、平衡传感器。内部传感器用测量到的角度、角速度、力等检测机器人的内部状态,了解机器人各执行机构的位置和姿态、运动速度等,以调整和控制机器人的自身行动。外部传感器主要有视觉传感器、触觉传感器、听觉传感器、冷觉传感器、病觉(异常)传感器、味觉传感器、嗅觉传感器等。外部传感器用来检测机器人所处环境、外部物体的状态或机器人与外部物体的关系。
工程机器人研究的现状表明,由于受到机构、控制、传感器以及人工智能水平的限制,研究出能在未知环境中全自主方式工作的机器人是目前难以实现的目标。因此,目前在核工业、抢险救灾等高危、恶劣的环境中被广泛应用的是遥操作机器人。遥操作机器人主要分为视觉临场感遥操作机器人、力觉临场感遥操作机器人、触觉临场感遥操作机器人及运动觉临场感遥操作机器人等。基于临场感的遥操作机器人系统原理如图3所示,它由操作者、主机器人(手控器)、通讯环节、从机器人和作业环境5部分构成。在临场感系统工作过程中,由操作者向主机器人发出操作命令(如位置指令)操作主机器人运动,主机器人的运动信息通过通讯环节传给远方的从机器人,从而控制从机器人的运动;当从机器人同环境交互时,从机器人的运动信息(如视觉、力觉、触觉等信息)又通过通讯环节反馈给本地主机器人,使操作者对于现场作业情况有了有效的感知,从而能够及时做出准确判断,发出相应的操作命令,控制远方从机器人准确、高效地完成作业任务。目前,基于视觉临场感的工程机器人遥操作控制主要是用摄像机获取现场的视频图像并回传到主控端,操纵者通过监视器来完成对工程机器人的操作任务。

图(3)
其中,通讯环节作为临场感系统的数据交换和连接环节,是控制量信息、传感器信息及视频、图像信息的传输通道,是临场感系统进行可靠工作的基本保障。

 手机版|
手机版|








